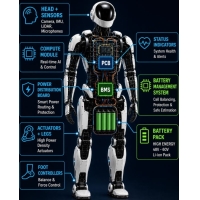
Robottijärjestelmät tarvitsevat mikro-ohjaimen ohjatakseen, yhdistääkseen ja suojatakseen niiden pääosia.MCU lukee anturisignaaleja, käsittelee dataa, ohjaa moottoreita, hallitsee ajoitusta, tallentaa tietoja ja tukee viestintää.Erilaisten IC-komponenttien avulla se mahdollistaa robottien työskentelyn turvallisesti, tarkasti ja tehokkaasti.Tämä artikkeli laajentaa ohjauskerroksen arkkitehtuuria, joka esiteltiin:Miten Tesla Optimuksen kaltaiset robotit toimivat: anturit, ohjaus, moottorit ja IC-arkkitehtuuri
Katalogi
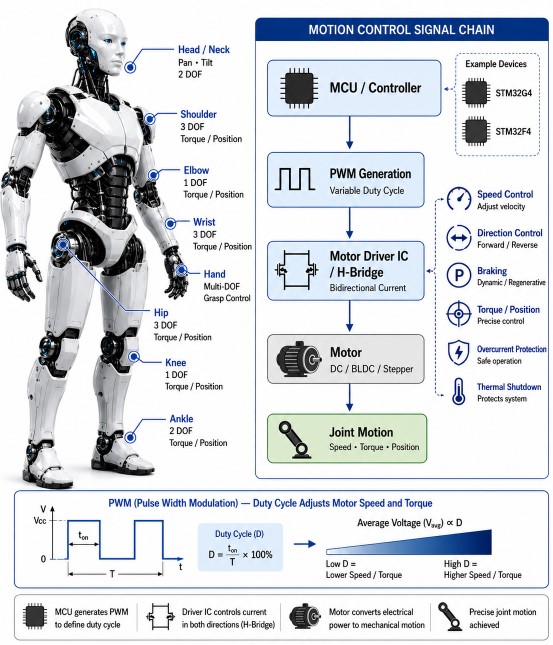
Kuva 1. Elektroniikka ja liikkeenohjausarkkitehtuuri robottijärjestelmissä
Microcontroller Unit (MCU) toimii robottijärjestelmän pääohjauskomponenttina, joka hallitsee ja koordinoi sen toimintaa.Se yhdistää prosessorin, muistin ja tulo/lähtöliitännät yhdeksi integroiduksi piiriksi tehokkaan sulautetun järjestelmän ohjaamiseksi.MCU vastaanottaa dataa antureilta, käsittelee tiedot ohjelmoitujen ohjeiden mukaisesti ja lähettää lähtösignaaleja toimilaitteille, kuten moottoreille ja servoille.
MCU hoitaa myös ajoituksen, tehtävien järjestyksen ja viestinnän järjestelmäkomponenttien välillä.Näiden toimintojen avulla robottijärjestelmät voivat toimia tarkasti ja ylläpitää vakaata suorituskykyä erilaisissa käyttöolosuhteissa.Varmistamalla luotettavan ohjauksen ja koordinaation MCU tukee koko robottijärjestelmän yhtenäistä ja tehokasta toimintaa.
Mikrokontrollerilaitteet ovat keskeisiä robottijärjestelmissä, ja ne toimivat integroituina piireinä, jotka yhdistävät käsittelyn, muistin ja oheisliitännät yhdeksi yksiköksi.Ne valitaan järjestelmävaatimusten, kuten prosessointinopeuden, muistikapasiteetin, syöttö-/tulostuskyvyn ja viestintätuen, perusteella.Robotiikassa MCU:t mahdollistavat ohjauksen, tietojenkäsittelyn, anturiliitännät ja toimilaitteiden hallinnan kompaktissa rakenteessa.
Kuva 2.
STM32F103C8T6
 STM32F103C8T6
STMicroelectronics
IC MCU 32BIT 64KB FLASH 48LQFP
In Stock: 35200 pcs
STM32F103C8T6
STMicroelectronics
IC MCU 32BIT 64KB FLASH 48LQFP
In Stock: 35200 pcs
(ARM Cortex-M3)
STM32F103C8T6 (ARM Cortex-M3)
STMicroelectronicsin STM32F103C8T6 on 32-bittinen mikro-ohjain, joka on suunniteltu matalan ja keskitason robottisovelluksiin.
Tärkeimmät ominaisuudet:
• Ydin: ARM Cortex-M3
• Kellotaajuus: Jopa 72 MHz
• Muisti: 64 kt Flash, 20 kt SRAM
• ADC: 12-bittinen resoluutio
• Viestintä: USART, SPI, I2C
• GPIO: Useita konfiguroitavia nastaja
• Ajastimet: PWM-tuki moottorin ohjaukselle
Robotiikan toiminnot:
• Luo PWM-signaaleja moottoriajureille
• Lukee kooderin, kytkimen ja anturin palautteen
• Tukee USART-, SPI- ja I²C-kommunikaatiota moduulien välillä
• Käsittelee suljetun silmukan perusohjauksen linjaa seuraavissa roboteissa ja pienissä automaatiojärjestelmissä
Kuva 3.
STM32F407VGT6
 STM32F407VGT6
STMicroelectronics
IC MCU 32BIT 1MB FLASH 100LQFP
In Stock: 17180 pcs
STM32F407VGT6
STMicroelectronics
IC MCU 32BIT 1MB FLASH 100LQFP
In Stock: 17180 pcs
(ARM Cortex-M4)
STM32F407VGT6 (ARM Cortex-M4)
STM32F407VGT6 on STMicroelectronicsin korkean suorituskyvyn mikro-ohjain, jota käytetään edistyneissä robottijärjestelmissä.
Tärkeimmät ominaisuudet:
• Ydin: ARM Cortex-M4 FPU:lla
• Kellotaajuus: Jopa 168 MHz
• Muisti: 1 Mt Flash, 192 Kt SRAM
• ADC/DAC: Nopea datamuunnos
• Tiedonsiirto: USART, SPI, I2C, CAN, USB, Ethernet
• Ajastimet: Edistyneet ohjausajastimet tarkkaa liikettä varten
• Lisävaruste: liukulukuyksikkö (FPU) nopeuttaa laskelmia
Robotiikan toiminnot:
• Käsittelee monimutkaisia ohjausalgoritmeja
• Mahdollistaa tarkan moottorin ja liikkeen ohjauksen
• Tukee useita antureita ja nopeaa tiedonkäsittelyä
• Käytetään robottiaseissa, droneissa ja reaaliaikaisissa ohjausjärjestelmissä
Molemmat MCU-piirit tarjoavat integroituja ratkaisuja ohjaukseen, käsittelyyn ja tietoliikenteeseen.Niiden ominaisuudet tukevat luotettavaa toimintaa erityyppisissä robottisovelluksissa yksinkertaisista sulautetuista järjestelmistä monimutkaisempiin, tehokkaampiin malleihin.
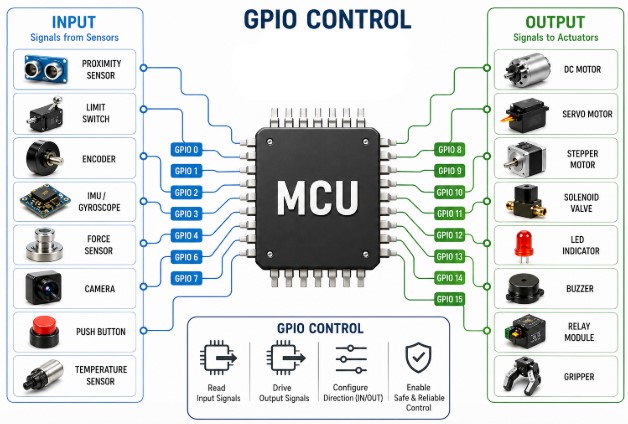
Kuva 4. Input and Output Control
GPIO (General Purpose Input/Output) -nastat ovat välttämättömiä mikro-ohjaimen liittämiseksi ulkoisiin komponentteihin robottijärjestelmässä.Niiden avulla MCU voi vastaanottaa digitaalisia tulosignaaleja laitteista, kuten kytkimistä, antureista ja raja-ilmaisimista, ja lähettää lähtösignaaleja ohjauskomponentteihin, kuten LEDeihin, releisiin ja yksinkertaisiin toimilaitteisiin.GPIO-nastat voidaan määrittää joko tuloksi tai ulostuloksi järjestelmävaatimuksista riippuen.
Liitäntäpiirit laajentavat GPIO:n kykyä mahdollistamalla yhteyden laitteisiin, jotka vaativat tiettyjä sähkötasoja tai ylimääräisiä I/O-kanavia.Näitä ovat tasonsiirtimet, puskurit ja portin laajentimet.
Kaksi yleistä esimerkkiä ovat Microchip Technologyn
MCP23017
 MCP23017
Micrel / Microchip Technology
922
In Stock: 24200 pcs
MCP23017
Micrel / Microchip Technology
922
In Stock: 24200 pcs
ja NXP Semiconductorsin
PCF8574
PCF8574
NXP
PCF8574 PHILPS SOP16
In Stock: 23535 pcs
.Molemmat ovat I2C-pohjaisia I/O-laajennuspiiriä, jotka lisäävät käytettävissä olevien GPIO-nastojen määrää.MCP23017 tarjoaa 16 ylimääräistä I/O-nastaa, kun taas PCF8574 tarjoaa 8 nastaa yksinkertaisemmassa kokoonpanossa.Nämä IC:t ovat hyödyllisiä robottijärjestelmissä, jotka vaativat useita antureita, kytkimiä tai lähtösäätimiä MCU:n sisäänrakennetun kapasiteetin ulkopuolella.
Yhdessä GPIO ja liitäntäpiirit tarjoavat luotettavan signaalinvaihdon MCU:n ja ulkoisen laitteiston välillä, mikä tukee tarkkaa ohjausta ja järjestelmän integrointia.
Moottoriohjainpiirit ohjaavat moottoreita syöttämällä tarvittavan virran ja jännitteen, jota mikro-ohjain ei voi tarjota suoraan.Ne toimivat rajapintana MCU:n ja moottorin välillä mahdollistaen suunnan, nopeuden ja jarrutuksen hallinnan.Useimmat moottoriohjaimet käyttävät H-siltakokoonpanoa, joka sallii virran kulkea molempiin suuntiin eteenpäin- ja taaksepäin liikkeessä.Suojaominaisuudet, kuten ylivirta ja lämpösammutus, tukevat turvallista käyttöä.
PWM (Pulse Width Modulation) -moduulit tuottavat signaaleja vaihtelevilla käyttöjaksoilla moottorin nopeuden säätämiseksi.Käyttöjakson muuttaminen säätää keskimääräistä moottoriin kohdistettua jännitettä, mikä mahdollistaa nopeuden ja vääntömomentin säätelyn.Tämä tukee sujuvaa liikettä ja hallittua kiihtyvyyttä.
STMicroelectronicsin STM32G4 on suunniteltu tehokkaaseen moottorin ohjaukseen ja sulautettuihin sovelluksiin.Se sisältää edistyneitä ajastimia, nopeita analogisia oheislaitteita ja digitaalisia signaalinkäsittelyominaisuuksia, jotka tukevat tarkkaa PWM-tuotantoa ja tehokasta moottorin ohjausta.
STMicroelectronicsin
STM32F4
STM32F4
ST
2146
In Stock: 42448 pcs
tarjoaa korkean suorituskyvyn ja joustavan oheislaitteiden integroinnin robotti- ja automaatiojärjestelmiin.Sen ARM Cortex-M4 -ydin ja reaaliaikaiset käsittelyominaisuudet tekevät siitä sopivan sovelluksiin, jotka vaativat luotettavaa ohjausta, viestintää ja signaalinkäsittelyä.
Ajastin- ja keskeytysohjainpiirit tukevat aikaperusteista toimintaa ja välitöntä reagointia tapahtumiin robottijärjestelmissä.Ajastimia käytetään mittaamaan aikavälejä, generoimaan viiveitä, laskemaan tapahtumia ja ohjaamaan säännöllisiä tehtäviä, kuten anturin näytteenottoa ja signaalin generointia.Niitä käytetään myös yleisesti PWM-generointiin moottorinohjaussovelluksissa.
Keskeytysohjaimet antavat järjestelmän reagoida nopeasti ulkoisiin tai sisäisiin signaaleihin odottamatta pääohjelmasilmukkaa.Kun keskeytys tapahtuu, MCU keskeyttää väliaikaisesti nykyisen tehtävänsä ja suorittaa erillisen keskeytyspalvelurutiinin (ISR).Tämä on tärkeää anturin laukaisujen, tietoliikennesignaalien, hätätapahtumien ja vikatilanteiden käsittelyssä.
STMicroelectronicsin STM32F334 tarjoaa edistyneitä ajastimen oheislaitteita, korkearesoluutioisen PWM-sukupolven ja nopeat keskeytysten käsittelyominaisuudet.Sen ARM Cortex-M4 -ydin ja integroidut ohjausominaisuudet tekevät siitä sopivan reaaliaikaiseen moottorin ohjaukseen, signaalinkäsittelyyn ja robotiikkasovelluksiin, jotka vaativat tarkkaa ajoitusta ja nopeaa järjestelmän vastetta.
Analog Devicesin LTC6994 on ohjelmoitava viiveajastin, joka tuottaa tarkat ajoitusviiveet ja pulssisignaalit.Se tukee säädettäviä viivevälejä, pulssinleveyden ohjausta ja vakaata ajoitustoimintaa, mikä tekee siitä hyödyllisen synkronoinnissa, tapahtumien ajoituksessa ja ohjaussignaalien generoinnissa sulautetuissa robottijärjestelmissä.
Nämä IC:t ovat erittäin hyödyllisiä tarkassa ajoituksessa ja nopeassa vasteessa, joita tarvitaan vakaaseen ja kontrolloituun robottitoimintaan.
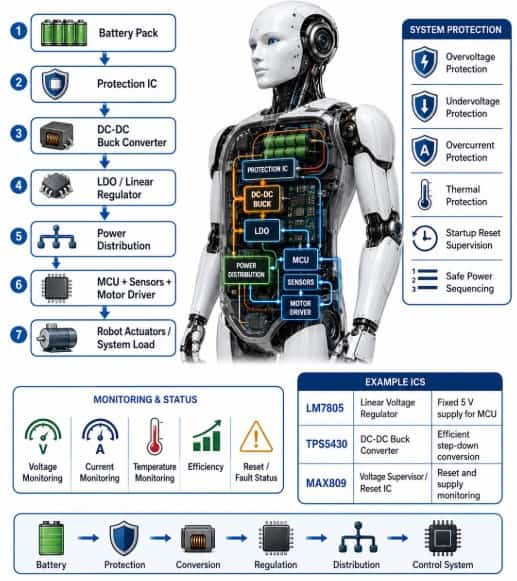
Kuva 6. Robotin tehonhallintaarkkitehtuuri
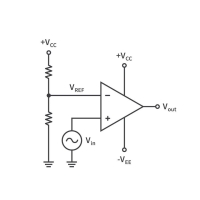
Analogi-digitaalimuuntimet (ADC) ja anturiliitäntäpiirit antavat mikro-ohjaimelle mahdollisuuden vastaanottaa todellisia signaaleja.Monet anturit, kuten lämpötila-, etäisyys- ja painelaitteet, tuottavat analogisia signaaleja, jotka on muutettava digitaalisiksi arvoiksi ennen käsittelyä.ADC suorittaa tämän muunnoksen, jotta MCU voi lukea ja käyttää tietoja.
Anturin liitäntäpiirit valmistelevat signaalit ennen muuntamista.Tämä sisältää vahvistuksen, suodatuksen ja tason säädön tarkkuuden parantamiseksi ja melun vähentämiseksi.Oikea signaalin säätö auttaa ylläpitämään vakaat ja johdonmukaiset mittaukset.
Nämä komponentit tukevat palautetoimintaa robottijärjestelmissä.MCU lukee anturin tiedot, vertaa sitä vaadittuun arvoon ja säätää lähtöä tarpeen mukaan.Tämä tukee moottorin nopeuden, asennon ja ympäristöolosuhteiden hallintaa.
Esimerkkejä ovat Texas Instrumentsin
ADS1115
ADS1115
TEXAS INSTRUMENTS
24044
In Stock: 35300 pcs
ja Texas Instrumentsin
OPA2188
OPA2188
TI
TI NA
In Stock: 19425 pcs
.
ADS1115 – Tärkeimmät ominaisuudet ja parametrit:
• Resoluutio: 16-bittinen
• Kanavat: 4 yksipäistä tai 2 differentiaalituloa
• Liitäntä: I2C-tietoliikenne
• Näytteenottotaajuus: Jopa 860 näytettä sekunnissa
• Ohjelmoitava vahvistusvahvistin (PGA): Parantaa mittausaluetta ja tarkkuutta
• Käyttöjännite: 2,0 V - 5,5 V
• Alhainen virrankulutus sulautetuissa sovelluksissa
OPA2188 – Tärkeimmät ominaisuudet ja parametrit:
• Tyyppi: Tarkkuuskaksoisoperaatiovahvistin
• Offset Voltage: Erittäin alhainen (tyypillisesti 25 µV)
• Drift: Lähes nollaa lämpötilan ylitys
• Syöttöjännite: 4 V - 36 V (yksi syöttö)
• Alhainen kohina ja erittäin tarkka signaalin vahvistus
• Rail-to-rail -sisäänmeno/lähtöominaisuus
• Korkea yhteistilan hylkäys takaa vakaat mittaukset
ADS1115 käsittelee tarkan signaalin muuntamisen, kun taas OPA2188 muokkaa ja vahvistaa anturin signaaleja ennen muuntamista.Nämä IC:t parantavat suljetun silmukan moottorin takaisinkytkentätarkkuutta
Muisti-IC:t ja kellokomponentit tukevat mikro-ohjainta tarjoamalla tallennus- ja ajoitustoimintoja, joita tarvitaan vakaaseen toimintaan.Muistipiirit tallentavat ohjelmakoodin, konfigurointiasetukset ja tärkeät tiedot, kun taas kellokomponentit tarjoavat ajoitusviittauksia käskyjen suorittamiseen ja järjestelmän koordinointiin.
Microchip Technologyn
AT24C256
AT24C256
ATMEL
AT24C256 ATMEGA SOP
In Stock: 3211 pcs
tarjoaa 256 kbit:n haihtumattoman EEPROM-tallennustilan I2C-tiedonsiirtorajapinnalla.Se tukee tavujen ja sivujen kirjoittamista, suurta kirjoituskestävyyttä ja pitkää tiedon säilytystä, jolloin MCU voi tallentaa ja hakea järjestelmäparametreja jopa virrankatkon jälkeen.
Maxim Integratedin
DS3231
DS3231
DALLAS
DS3231 MAXIM SOP16
In Stock: 6917 pcs
tarjoaa tarkan ajanoton integroidulla sekuntien, minuuttien, tuntien ja päivämäärän seurannalla.Siinä on lämpötilakompensoitu kideoskillaattori (TCXO), akkuvarmistustuki, I2C-viestintä ja hälytystoiminnot ajoitettuja toimintoja varten.
Nämä IC:t tarjoavat luotettavan tiedontallennustilan ja tarkan ajoituksen tasaisen MCU:n suorituskyvyn takaamiseksi.
Virranhallintapiirit säätelevät ja suojaavat mikro-ohjaimen ja muiden robottijärjestelmän komponenttien käyttämää sähkönsyöttöä.Ne varmistavat, että jännite on vakaa, tehokas ja turvallisten käyttörajojen sisällä.Erityyppisiä IC:itä käytetään suorittamaan tiettyjä toimintoja, kuten jännitteen säätöä, tehon muuntamista ja järjestelmän suojausta.
Alla olevassa taulukossa on yhteenveto yleisesti käytetyistä virranhallinta-IC:istä ja niiden rooleista MCU-pohjaisessa robottijärjestelmässä.
IC-komponentti
|
Valmistaja
|
Kirjoita
|
Tärkeimmät ominaisuudet
|
Toiminto MCU-järjestelmässä
|
LM7805
LM7805
HS
LM7805 HTC TO-220
In Stock: 34238 pcs
|
Texas Instruments
|
Lineaarinen jännitteensäädin
|
Kiinteä 5 V lähtö, yksinkertainen rakenne, hiljainen
|
Tarjoaa vakaan jännitteensyötön MCU:lle
|
TPS5430
TPS5430
TI
TPS5430 TI SOP-8
In Stock: 119584 pcs
|
Texas Instruments
|
DC-DC Buck-muunnin
|
Korkea hyötysuhde, säädettävä teho, leveä
syöttöalue
|
Vähentää jännitettä tehokkaasti MCU:lle
ja komponentit
|
MAX809
MAX809
Maxim
MAXIM SOT23
In Stock: 131922 pcs
|
Maxim integroitu
|
Jännitteenvalvoja / Reset IC
|
Jännitteen valvonta, nollauslähtö, alhainen
tehoa
|
Suojaa MCU:ta epävakaalta jännitteeltä ja
varmistaa oikean käynnistyksen
|
Jaa tämä viesti